Minimization Visualization¶
This tutorial shows how to visualize energy minimization trajectories
using plt-min. You will produce energy profiles, 2D optimization
landscapes, and convergence panels.
Reference
The 2D projection method used here is described in:
R. Goswami, “Two-dimensional RMSD projections for reaction path visualization and validation,” MethodsX, p. 103851, Mar. 2026, doi:10.1016/j.mex.2026.103851.
Prerequisites¶
plt-min reads eOn minimization output: a movie file (multi-frame
.con), a .dat iteration log, and optionally the final structure.
pip install "rgpycrumbs[all]"
The expected directory layout:
min_job/
min # multi-frame .con trajectory (movie file)
min.dat # TSV: iteration, step_size, convergence, energy
min.con # (optional) final minimized structure
The file prefix defaults to min but can be changed with --prefix
(e.g., --prefix qm_min for qm_min, qm_min.dat, qm_min.con).
Step 1: Energy Profile¶
The profile plot shows total energy vs iteration. A successful minimization shows monotonically decreasing energy converging to a plateau.
rgpycrumbs eon plt-min \
--job-dir min_job/ \
--plot-type profile \
-o min_profile.pdf
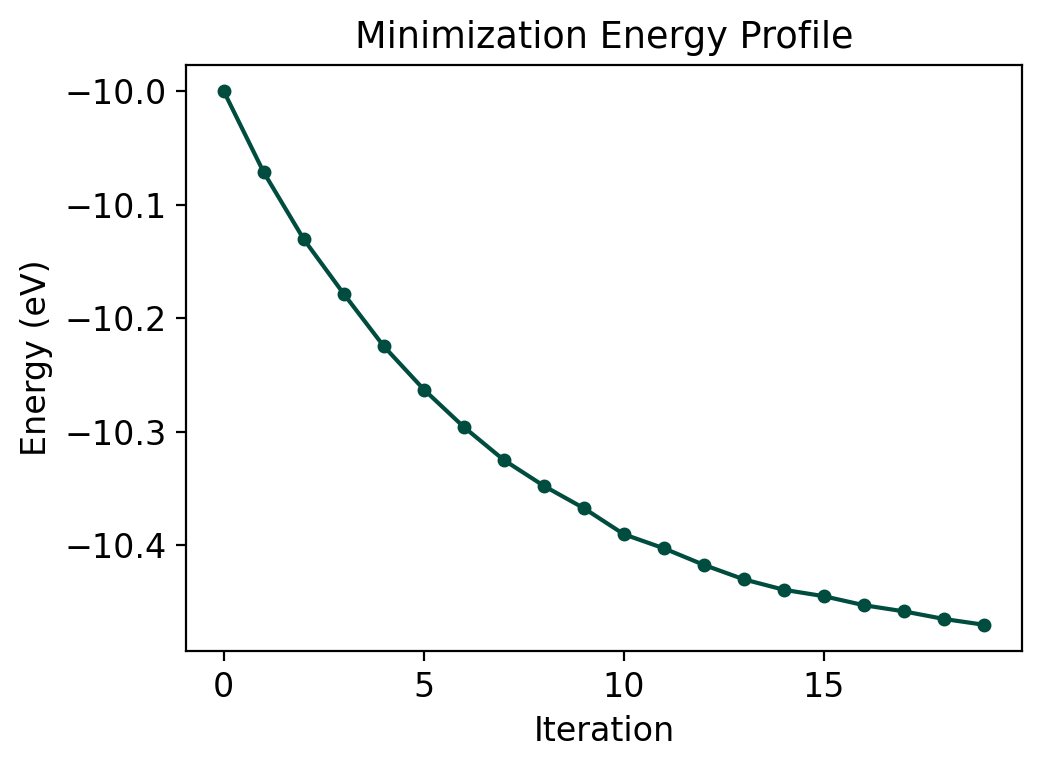
The exponential decay shape is typical for gradient descent minimization. The curve should flatten as forces approach zero.
Step 2: 2D Optimization Landscape¶
The landscape projects the trajectory into (s, d) coordinates:
s (progress): RMSD distance from initial to final structure
d (deviation): lateral displacement from the direct path
rgpycrumbs eon plt-min \
--job-dir min_job/ \
--plot-type landscape \
--surface-type grad_matern \
--project-path \
-o min_landscape.pdf
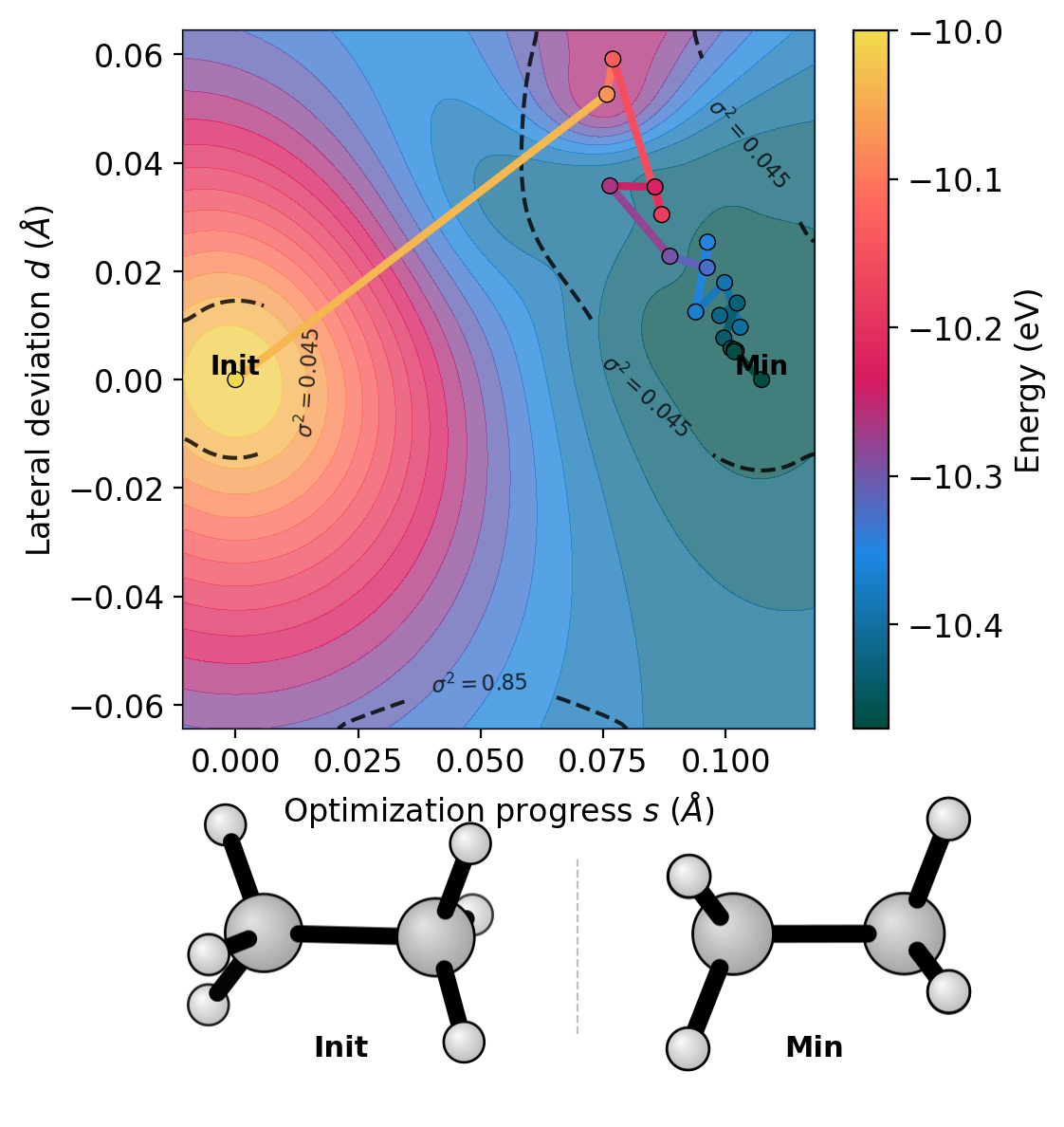
For a well-behaved minimization, the trajectory should follow the energy valley from the initial displaced geometry toward the minimum. Large lateral deviations indicate the optimizer is exploring off-pathway configurations.
Step 3: Convergence Panel¶
The convergence panel monitors the force norm and step size to diagnose optimization quality.
rgpycrumbs eon plt-min \
--job-dir min_job/ \
--plot-type convergence \
-o min_convergence.pdf
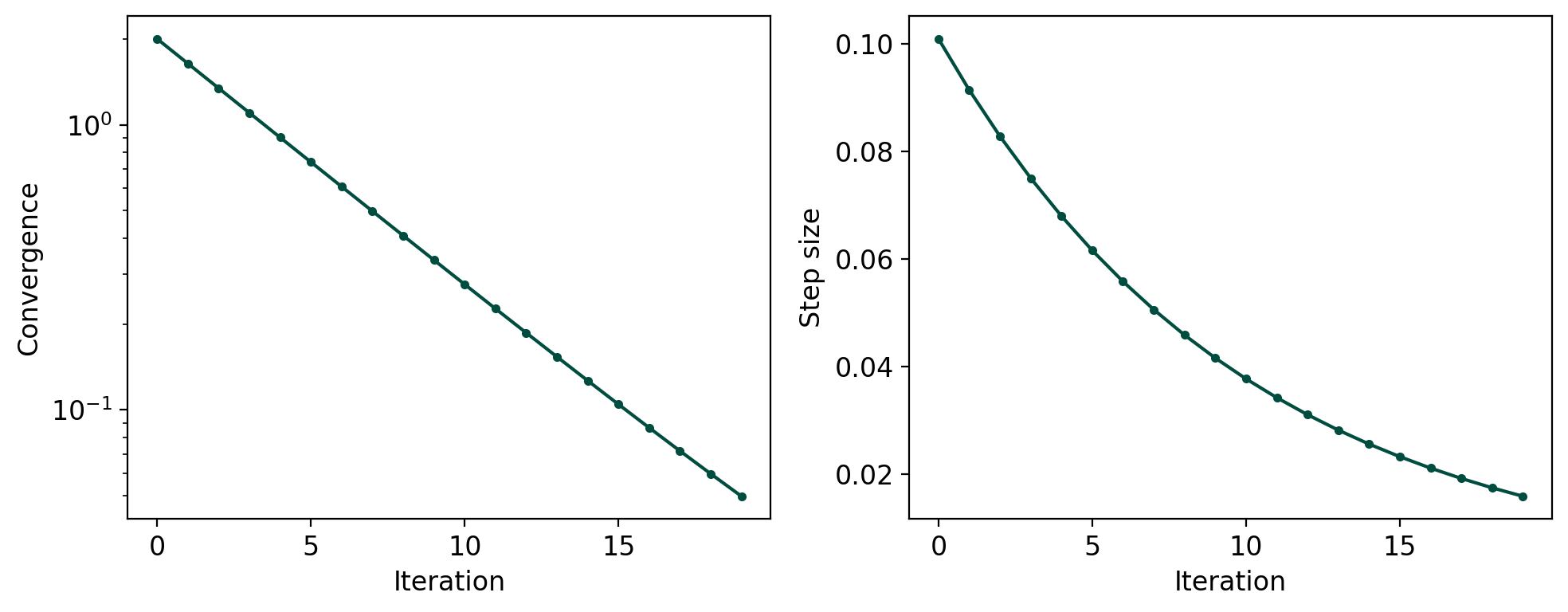
Both curves should decrease monotonically. Oscillations in the force norm suggest the step size is too large or the optimizer is struggling with the PES topology.
Custom File Prefix¶
eOn minimization jobs can use different prefixes depending on the job
type. Use --prefix to match:
# For jobs with qm_min, qm_min.dat, qm_min.con
rgpycrumbs eon plt-min --job-dir job/ --prefix qm_min --plot-type profile
Step 4: Comparing Optimizers¶
Use --job-dir multiple times to overlay trajectories from different
optimizers (FIRE, LBFGS, SD) on the same plot:
rgpycrumbs eon plt-min \
--job-dir fire_min/ --label FIRE \
--job-dir lbfgs_min/ --label LBFGS \
--job-dir sd_min/ --label SD \
--plot-type profile \
-o optimizer_comparison.pdf
Each trajectory is plotted with a different color and appears in the legend. This works for profile, landscape, and convergence plots. On the landscape, the GP surface is fitted from the primary (first) trajectory, and all paths are overlaid.
# Convergence comparison
rgpycrumbs eon plt-min \
--job-dir fire_min/ --label FIRE \
--job-dir lbfgs_min/ --label LBFGS \
--plot-type convergence \
-o convergence_comparison.pdf
Summary¶
Feature |
Flag |
Notes |
|---|---|---|
Energy profile |
|
Energy vs iteration |
2D landscape |
|
GP surface fit |
Convergence |
|
Force + step size |
Multi-trajectory |
|
Overlay with legend |
Structure strip |
|
Init and Min below |
Custom prefix |
|
For non-default file names |
Projection toggle |
|
Default: on |
See Also¶
Goswami, “Two-dimensional RMSD projections for reaction path visualization and validation,” MethodsX, p. 103851, Mar. 2026, doi:10.1016/j.mex.2026.103851